
Студент МАИ разработал робота-змею для поиска людей под завалами


За счёт своего небольшого размера робот может проникать даже в труднодоступные места под завалами, которые невозможно обследовать другими способами. Устройство отличается от существующих аналогов наличием двух камер — в головной и хвостовой части — и способностью свободно двигаться как вперёд, так и назад, что помогает ему не застрять в ограниченном пространстве.
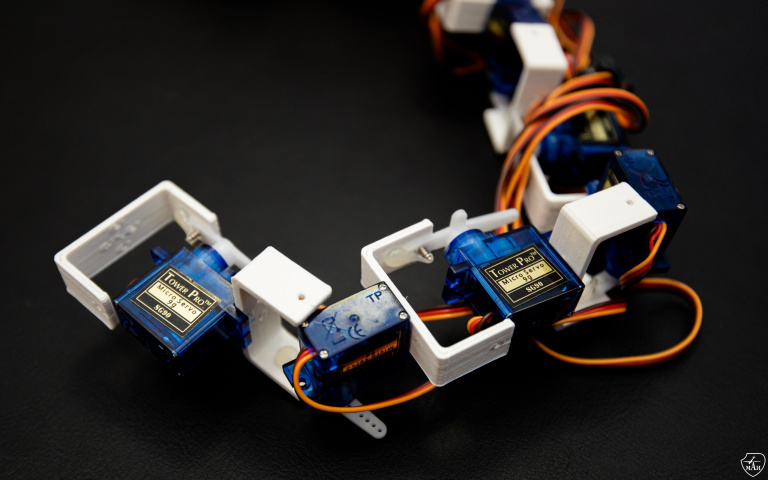
В настоящее время студент собрал прототип устройства, который удостоился второго места на научно-технической конференции «Аэрокосмическая декада — 2021».
«Основное назначение разработки — помощь спасателям МЧС в поиске пострадавших после землетрясений. В ситуациях, когда разобрать завал пока что не представляется возможным, а образованный проход слишком мал, в дело вступает робот. Кроме того, разработка будет полезна в случаях, когда сохраняется опасность повторных толчков и предпочтительнее осуществлять поисковые работы с помощью техники», — рассказывает Михаил Должанский.Работа над проектом ведётся под руководством директора Ресурсного центра научных исследований и инновационных технологий МАИ Анатолия Михайловича Качалина, который имеет опыт ликвидации последствий землетрясений в Армении.
«Разработанная система напоминает змею не только по внешнему виду, но и по характеру движения. Кстати, тип движения робота будет меняться в зависимости от рельефа поверхности, на которой он находится: так же, как и у змей», — говорит автор разработки.
Одним из преимуществ робота является возможность не только дистанционного, но и аналогового управления — то есть с помощью провода. Эта функция может применяться в случае, если сигнал плохо проходит между железобетонными конструкциями и дистанционное управление затруднено.
В дальнейших планах Михаила — улучшить систему приёма и передачи сигнала, сделав её более мощной, и доработать конструкцию робота для увеличения его маневренности и проходимости. По его оценкам, проект будет готов к внедрению в 2023 году.
Технологии
МАИ

 Студент МАИ разработал прибор для беспилотного радиационного мониторинга
Студент МАИ разработал прибор для беспилотного радиационного мониторинга Учёный МАИ предложил новые подходы к устранению колебаний космических конструкций
Учёный МАИ предложил новые подходы к устранению колебаний космических конструкций







